Third Insight specializes in artificial intelligence and computer-vision based analytics in support of real-time Intelligence, Surveillance, and Reconnaissance (ISR).
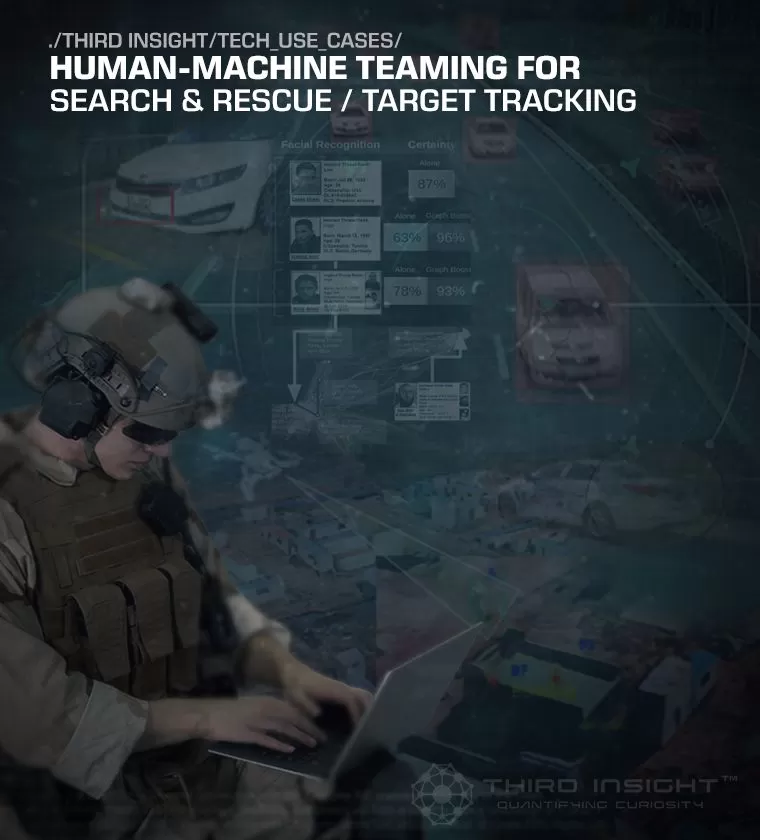
HUMAN-MACHINE TEAMING
FOR SAR / TARGET TRACKING
ACTIVE DATE
2018 - PRESENT
PROJECT TYPE
PHASE I & II
CLIENT / PARTNER
AFRL & DHS
Project Summary
The technology developed as part of this project incorporates explainability and the creation of shared human-agent common ground into our existing decentralized swarm collaboration and tasking technology.
Completed as part of multiple AFRL and DHS projects (2018 – 2023) focused around various applications in Search & Rescue and Intelligence, Surveillance, & Reconnaissance.
Air Force Research Laboratory
Department Of Homeland Security
Project Details
Search and Rescue (SAR) operators team with autonomous agents to target, track, and engage.
Autonomous agents carry out mission-specific Courses-of-Action in tandem with humans.
Agent understands Commander's Intent and completes goal-based planning.
Scene details are compared against a knowledge base enabling identification of obstacles in Courses-of-Action.
If the Course-of-Action requires a change, the autonomous agent communicates this to the human operator with whom it works to iteratively identify a new Course-of-Action.
Common ground is built via explainable decision-making, helping to build operator-agent trust and enable safer and faster completion of dangerous tasks.
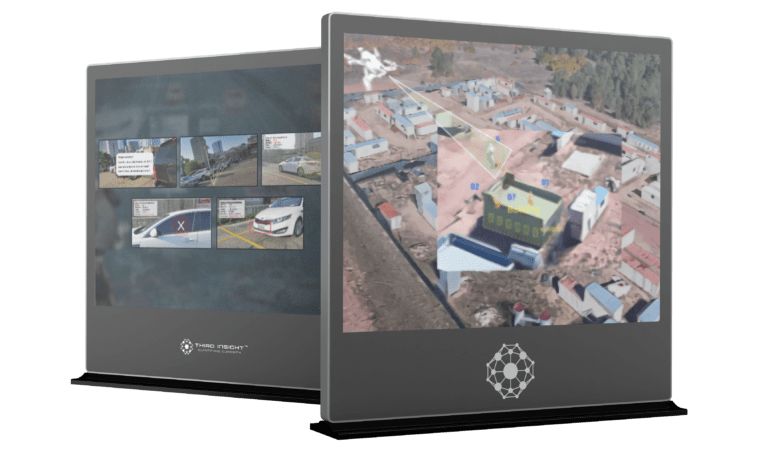
Figure 1
Left:
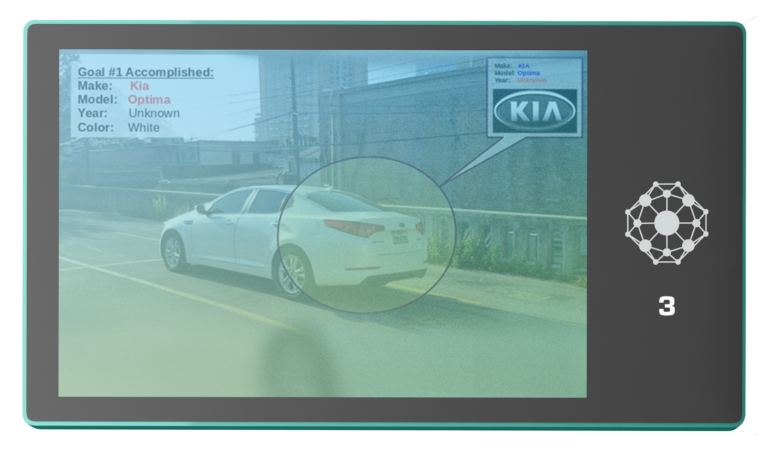
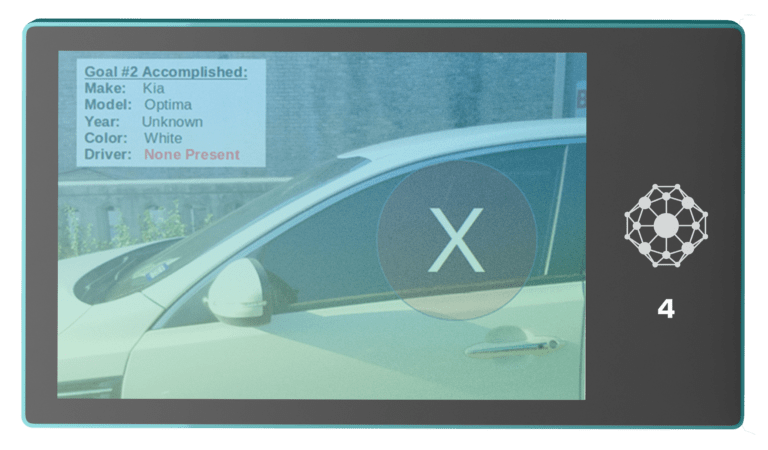
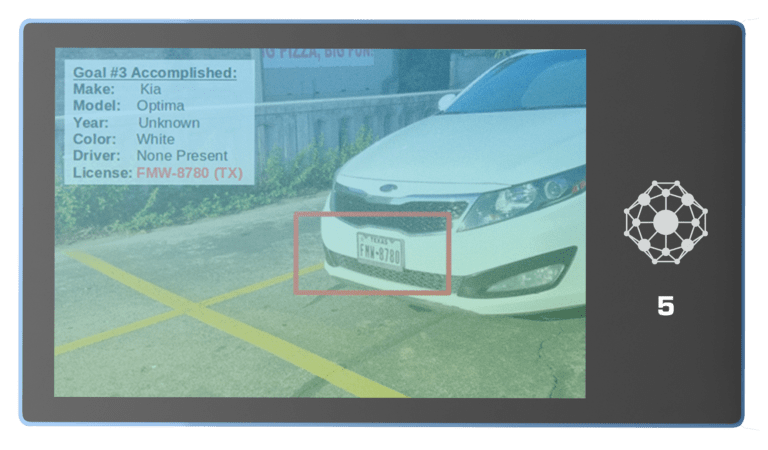
Graphical abstract showing the process of an autonomous agent finding the driver of a specific car. Right:
UAV target tracking in an urban environment.
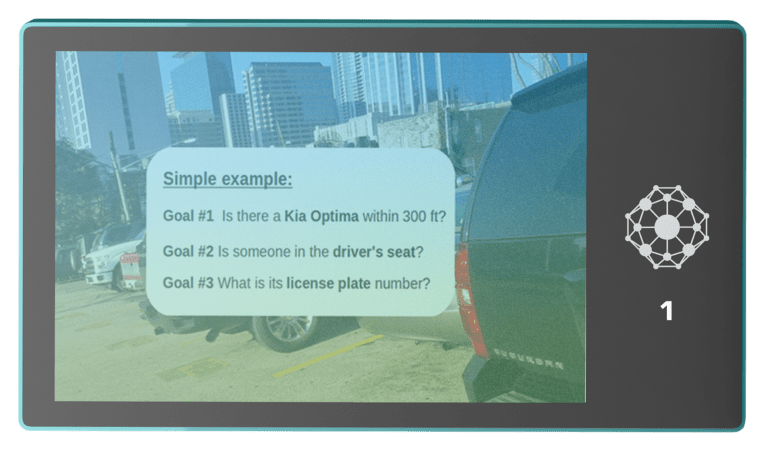
Automotive Tracking & Reasoning
Target Tracking Ex - Step 1
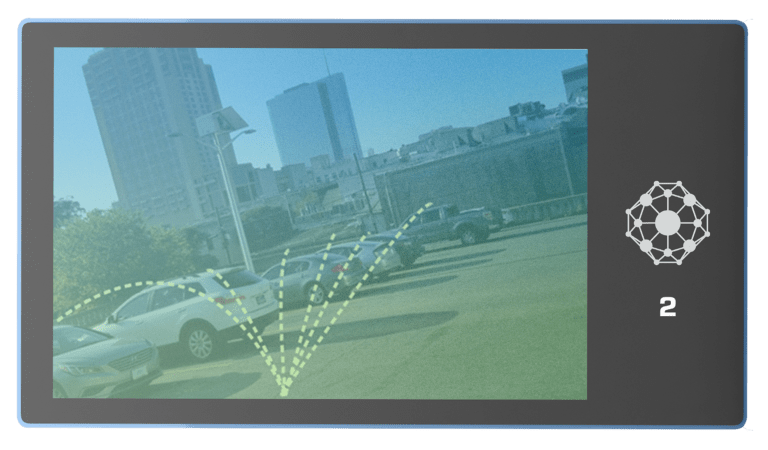
Target Tracking Ex - Step 2
Target Tracking Ex - Step 3
Target Tracking Ex - Step 4
Target Tracking Ex - Step 5
Previous
Next
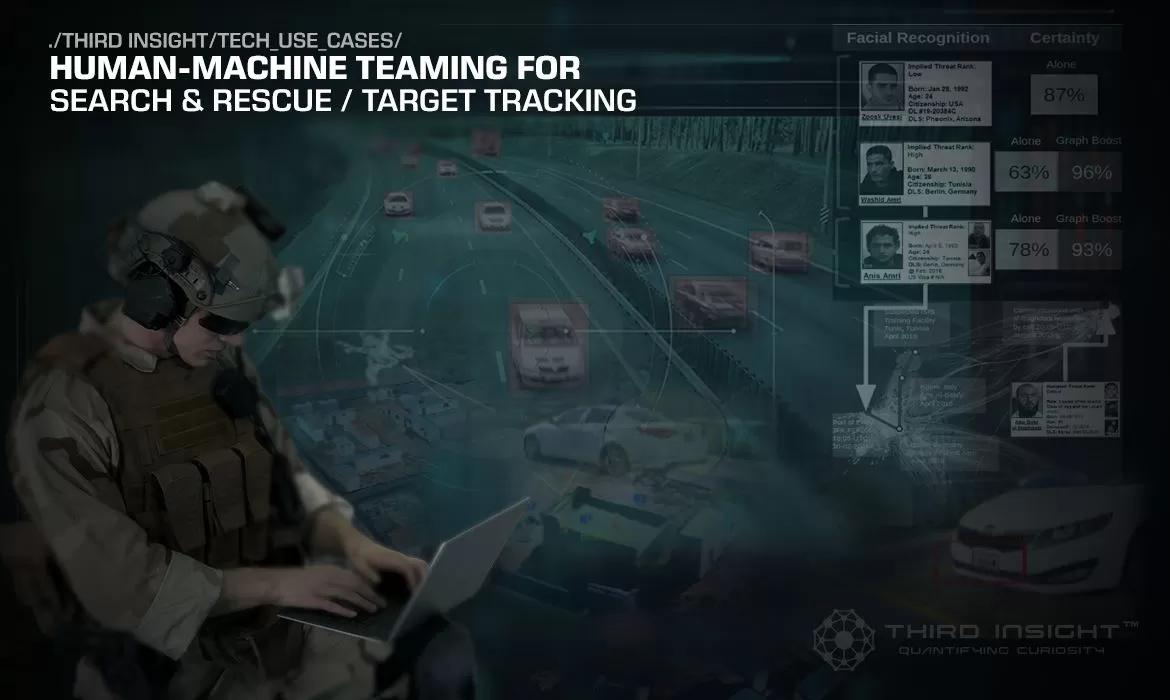
The Genesis™ software platform goes beyond identifying suspects in a crowded environment, assigning identification confidence based on proximity of known associates..